
CIM论文 │ 基于CIM的塔吊碰撞预警系统研究
来源丨《中国建设信息化》2023.21
发布丨 CIM小编
本文字数:6225
阅读时间:6分钟
石俊卫 何宇杰
奥格科技股份有限公司
【摘要】工地上对于塔吊的管理涉及到重要的安全问题,也是智慧工地研究的重点和难点,CIM的概念出现以后,为智慧工地的建设提供了一种新的思路。本文重点围绕工地塔吊的管理问题,以CIM平台作为底座,搭建CIM+智慧工地系统,实现工地塔吊的实时监测和防碰撞预警,从而提高工地管理的智慧化水平,减少意外事故的发生,保障施工人员的人身安全和工程的顺利施工。
【关键词】CIM;智慧工地;塔吊管理;碰撞预警
【中图分类号】TP315
【文献标识码】A
1.1 CIM平台发展概况
2007年,Khemlani提出City Information Modeling(CIM)这一概念,当时CIM还只是简单的被理解为BIM在城市范围内的应用。2014年,Xu等人提出通过集成BIM和Geographic Information System(GIS)来建立CIM。2015年,同济大学吴志强院士将这一概念延伸为City Intelligent Modeling,即城市智能信息模型,至此,物联网Internet of Things(IoT)技术也逐渐与BIM、GIS技术一并成为了CIM的主要技术支持[1]。2016年城市信息模型(CIM)概念在国内被正式提出以来,经过近些年的发展已成为新型智慧城市建设的热点,并且受到政府和各行各业的高度关注和认同。目前,CIM研究在国内外都处于初级阶段,其主要研究方向可划分三大方向:框架设计、数据融合及可视化。
自2018年起,广州、南京、北京、厦门、雄安新区被列为CIM试点城市建设以来,住房和城乡建设部等部门多次颁布了CIM相关政策文件。为指导各地推进CIM基础平台建设,2020年6月住房和城乡建设部会同工业和信息化部、中央网信办印发《关于开展城市信息模型(CIM)基础平台建设的指导意见》,提出了CIM基础平台建设的基本原则、主要目标等,要求“全面推进城市CIM基础平台建设和CIM基础平台在城市规划建设管理领域的广泛应用,带动自主可控技术应用和相关产业发展,提升城市精细化、智慧化管理水平”。在CIM平台建设的基础上,CIM+城市更新、CIM+智慧工地、CIM+智慧园区等“CIM+”应用等得到快速发展。
1.2 智慧工地塔吊管理发展现状
随着我国城镇化、新基建和大型工业场地等工程的建设,建筑工地数量呈快速上升趋势,随之而来的是连年不断上升的工地安全事故问题,安全形势不容乐观。十八大以来,党中央高度关注建筑业发展和改革问题,2014年住房和城乡建设部发布《关于推进建筑业发展和改革的若干意见》,要求全面推进“智慧工地”的建设,利用信息化手段将建筑工地上的人员、设施设备进行全方位的管理,通过计算机算法、大数据分析辅助工地管理人员进行科学监督决策,从而保障施工现场人员和设备的安全和有序作业。起重机作为建筑工地常见的大型机械设备,主要包括塔式起重机(简称“塔吊”)、汽车吊和履带吊等。近年来,塔吊安装运营数量较以往有了明显的增长,大型塔吊、移动式履带吊所占的比重越来越大,而大型塔吊与移动式吊车的事故率连续多年居高不下。据不完全统计,2010-2019年我国至少发生塔吊生产安全事故382起[2],引起了社会上的广泛关注,政府也多次发文强调要求加强管理。塔吊事故类型比较多,常见的主要有碰撞、倾翻、吊物坠落、折断臂、构建脱落、工人事故等,但主要以碰撞、倾翻和断脱绳事故为主[3]。因此,基于生产安全要求,需要对塔吊进行实时作业监控,并建立塔吊防碰撞预警机制,从而保证人员生命安全与项目工程顺利施工。段锐等[4]提出了未来塔吊安全管理的目标和框架,将信息与通信技术(ICT)中有潜力的建筑信息模型(BIM)与计算机视觉技术(CV)融入塔吊安全管理框架中,有利于实现对于塔吊运行过程的实时监控和危险预警,有效减少事故的发生。王倩与田莉梅[5]提出通过搭建塔吊安全管理信息共享平台,找到塔吊事故风险源与BIM相关技术的对应关系,可实现风险与管理活动的匹配关系。牛前进等[6]提出将人工智能中的无人驾驶技术以及精确导航定位技术应用在塔吊的运行系统之中,这将会大大提升塔吊的运输效率和协同工作效率,减少施工过程中人员的参与,降低塔吊施工过程的事故率。
2.1 研究内容
本文重点是对基于CIM平台的塔吊碰撞预警系统进行研究,并对其实现的设计思路、功能模块、数据场景搭建、物联数据对接与防碰撞预警的应用进行深入的分析。
2.2 研究目标
针对当前工地大型塔吊与移动式吊车常见的碰撞、倾翻和断脱绳事故问题,基于CIM平台的塔吊碰撞预警系统使用三维空间防碰撞预警算法来实现群塔吊之间的防碰撞预警、吊重预警、大臂倾角异常预警等,在实现大规模项目塔机作业预警的同时,还支持固定式、移动式等多类型塔机远程信息接入传输,实现对塔吊的管理。主要研究目标包含以下四个方面:
(1)场景三维建模与展示:建立项目场地场景三维模型,对场地模型数据进行单体化和轻量化处理,完成塔吊三维建模,将建立的三维模型在系统上展示浏览。
(2)塔吊物联数据接入监测与管理:对接塔吊物联感知数据,系统上能模拟实时塔吊运行,实时展示塔吊运行时间、吊重、大臂转动幅度等信息,并统计分析塔吊运行状态信息,同时实现对塔吊数据进行管理。
(3)塔吊碰撞实时预警:根据物联传感设备数据,利用三维模型碰撞分析算法实现塔吊碰撞实时预警功能,预防塔吊碰撞,并对预警信息进行记录和统计分析。
(4)视频投影虚实结合:将监控视频投射到三维空间场景里,实现视频数据与三维场景数据的全时空立体融合。
3.1 系统架构设计
基于CIM的塔吊碰撞预警系统集成物联网(IoT)、GIS、BIM,实现对塔吊等信息数据的采集、储存、传递,满足塔吊监测、防碰撞预警等各项应用需求。系统整体架构分为六层,分别为:设施层、传输层、数据层、服务层、应用层、展示层,如图1所示。

图1 系统架构设计图
其中设施层包括塔吊、汽车吊、履带吊的倾角传感器、回转编码器、高度传感器、风速传感器、无线重量传感器以及其它物联终端设备等;传输层包括IoT物联网服务、综合网关、无线网桥等;数据层包括栅格数据、矢量数据、BIM数据、倾斜摄影数据、建模数据等二三维数据以及传感器数据、视频数据等业务数据;服务层主要来自CIM平台的数据模拟分析服务、数据管理服务、数据集成服务等;应用层主要包括系统的数据管理应用、三维场景模拟应用、塔吊监测与管理应用、防碰撞预警应用、视频投影应用已经统计分析应用,展示层包括Web端展示以及综合大屏端展示。
3.2 系统部署架构
系统由塔吊监控硬件设备、数据传输模块、防碰撞监测软件3部分组成。采用专线与lora网关结合的方式,固定塔吊拉专线较为方便、移动式吊车不宜拉专线,采用lora网关的方式对接,lora网关再通过专线的方式,将数据传送机房的服务器上,在机房服务器上部署防碰撞系统,并将计算后的结果发送到塔吊监控室,当监控室人员接收到预警之后,采用对讲机提醒塔吊操作人员,提高塔吊防碰撞识别性,从而有效地辅助塔吊司机进行高空作业。

图2 系统部署架构
3.3 二三维场景搭建
二三维场景数据作为系统的底图,包括项目场地三维倾斜摄影数据、塔吊建模数据、地形数据(DEM)以及遥感影像数据等。在完成三维倾斜摄影数据轻量化与其他基础地理信息数据的服务发布处理后,需要将项目场地上的塔吊进行实体建模。因为在防碰撞预警功能实现中,需要根据塔吊模型的大小等参数进行防碰撞预警的算法判断,所以在建模过程中要求做到1∶1真实还原施工场地上的塔吊设备,模型的地理坐标位置也需要精确定位。塔吊的建模主体主要包括塔(车)身、大臂、吊钩等结构,其中汽车吊还包括伸缩臂、转台等复杂构件。在建模过程中需要根据不同的塔吊类型使用不同的建模参数,其中塔吊建模参数包括:塔吊型号、塔顶距离地面高度、吊臂距离地面高度、平衡臂长、吊臂长、塔吊颜色、坐标位置以及样式照片;移动式吊车建模参数包括:吊车型号、整机尺寸、最大起升高度、起重臂最大长度、变幅角度以及样式照片,其中,大型履带吊还需要细分主臂长度与副臂长度。数字孪生建模在实施过程中面临着不少难点,其中,最大的问题就在于塔吊的吊钩升降模拟、汽车吊的液压杆伸缩模拟以及履带吊的拉绳模拟,这三个问题都有一个共通点,就是在模拟过程中会发生长度或角度的变化。本研究通过建模软件的自定义动画将模拟过程中会发生长度或高度变化的构建进行建模,导出gltf格式的模型数据,再结合软件代码从而实现对塔吊模型的控制。

图3 汽车吊控制模拟效果
3.4 物联传感数据获取接入与孪生模拟
基于CIM的塔吊碰撞预警系统通过倾角传感器、风速传感器等物联传感设备获取塔吊实时作业运行数据,将实时运行数据与对应的塔吊构件进行对接,从而实现塔吊的孪生模拟。由于塔吊、汽车吊、履带吊机械结构的差异,在作业过程中会存在不同的运行状态,因此需要细分每种塔吊类型的物联传感数据。其中塔吊包括大臂回转角度、滑轨移动距离、吊钩长度、吊重以及风速数据;汽车吊包括大臂倾角、大臂伸缩长度、主副钩长度、吊重以及GPS定位坐标数据;履带吊包括大臂倾角、副臂倾角、主副钩长度、吊重以及风速等数据。在实现塔吊孪生模拟的过程中,需要根据每一项参数与塔吊的各项构件进行一一对应,例如倾角传感器对应塔吊大臂倾角、回转编码器对应塔吊大臂回转角度等,需要注意的是,在对接传感数据时,需要根据每一项构件的归零角度和高度进行设置,避免出现初始角度和高度不一致的情况。完成传感数据对接后,还需要结合塔吊自身的塔身高度、机身尺寸等基础信息进行1∶1还原,从而模拟出塔吊大臂、吊钩、汽车吊大臂以及履带吊大臂的实时空间位置,实现塔吊孪生模拟。最后结合计算机算法,判断出塔吊之间的安全距离,实现精准预警。此外,对于大臂倾角、吊重等参数存在异常时,同样能发出监测预警。
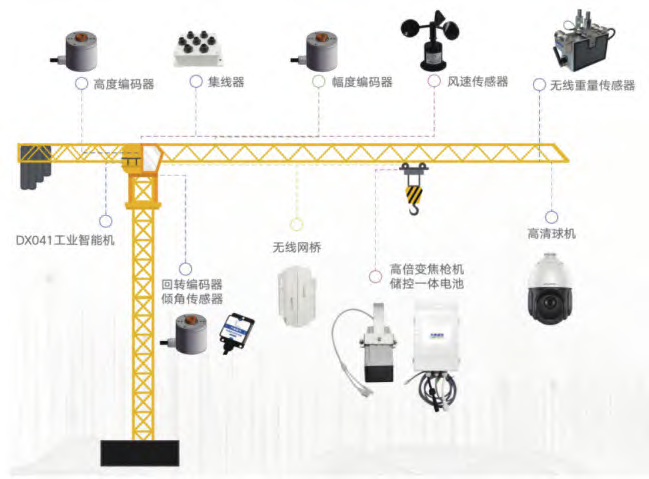
图4 塔机物联传感设备布置图
3.5 防碰撞预警
塔吊防碰撞预警功能作为系统的重点建设内容,包括塔吊与塔吊之间、塔吊与移动吊之间、移动吊与移动吊之间的碰撞预警。系统完成物联传感器实时监测数据对接后,获取到大臂回转角度、吊钩高度、小车幅度等数据,在系统中可预设塔吊的碰撞预警距离,对相邻的塔吊进行空间碰撞运算。在防碰撞预警算法实现过程中,将塔吊模型各个构件生成虚拟包围盒,将获取的物联传感数据同步到包围盒使其与塔吊一样进行孪生模拟,各个构件包围盒之间进行空间距离运算,从而判断出塔吊大臂、吊钩、塔(车)身每一处的最短触碰距离,当相邻塔吊之间达到预设的距离时,系统发出预警信息,并发出声光警报。同时,系统前端支持记录24小时预警历史信息,并在后台记录所有发生的碰撞预警信息,这对于防碰撞预警信息统计分析功能提供了数据支撑。此外,系统会将各个设备的位置、运动信息以及预警状态实时显示在界面上,供管理人员观察和判断,帮助管理人员及时发现潜在的碰撞风险,以作分析决策,并采取必要的措施避免事故发生。
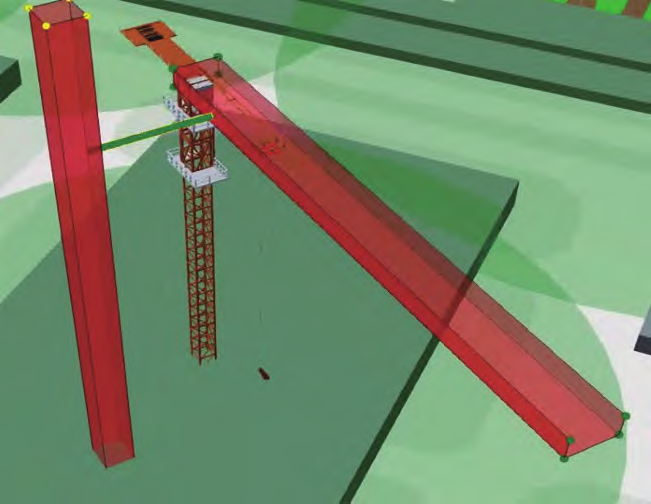
图5 防碰撞算法场景
针对移动式吊车作业许可范围限制监督问题,系统开发了自定义绘制电子围栏模拟吊车作业范围的功能,利用吊车GPS定位仪实时跟踪其位置所在,若在吊车运行作业期间离开或大臂超出作业许可范围,则触发预警,可以很好的做到监督移动式吊车作业范围是否合规的作用。

图6 塔臂与塔身碰撞预警

图7 塔吊与汽车吊碰撞预警
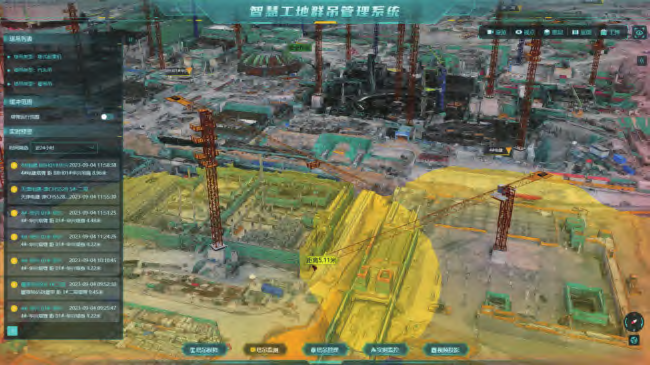
图8 塔臂与吊钩碰撞预警
3.6 视频监控与投影
视频监控与投影功能作为系统辅助性功能,主要的作用在于辅助管理人员查看施工现场实时场景情况。通过对接施工现场塔吊监控视频,将监控视频与对应塔吊挂接,在系统上可以查看塔吊运行作业实时视频。在塔吊发生碰撞预警时,根据碰撞相关塔吊编号,可进行快速关联调出挂接的视频监控画面,辅助管理人员迅速了解现场情况。
而视频投影功能是对视频监控的升级,在CIM平台场景中实现了二三维场景与视频画面的统一联动融合。通过查看视频监控画面所在地理位置,在CIM平台中寻找对应的空间位置,绘制监控视频画面,可实现同步视角的浏览。此功能实现了整体宏观和细节场景的协调统一态势感知,高效用于工地施工监控、治安监控、交通监控等场景应用。

图9 视频投影功能效果
3.7 统计分析与评价
根据对接的塔吊信息、塔吊上的实时感知数据,对塔吊进行塔吊统计、预警统计、异常统计、运行分析等,让相关人员可以整体了解全部塔吊的信息,根据塔吊运行时间、预警次数、预警类型等数据,评价塔吊整体运行情况,为塔吊管理工作提供数据支撑。
CIM塔吊碰撞预警系统可以减少意外碰撞导致的设备损坏、人员伤害以及生产中断的风险,同时提高吊装设备的操作精度和效率。
(1)提高施工作业整体安全性:起重机作业安全对施工项目整体安全性至关重要。基于CIM的塔吊碰撞预警系统不仅有助于保护作业人员免受意外伤害,还能预防碰撞、过载、倾翻等问题带来的经济损失,降低计划外停机成本费用。通过安装倾角传感器、无线吊重传感器、高度编码器、回转编码器、幅度编码器、风速传感器等物联设备,将物联设备对接到系统场景中,从而实现项目现场的可视化、降低施工作业过程中的监督难度和风险、提高施工作业过程的安全性。
(2)增强工地塔吊操作员视力:封闭的塔吊驾驶室通常会阻碍操作员的视线,并且在误差幅度非常低的复杂站点中会更加严重。即使在开放式驾驶室中,门式起重机周围仍然存在盲点。相比起传统的单物联网监控,塔吊系统不仅可以使操作员能够更好地观察周围环境,还可以利用数字孪生使监控人员直接快速获取施工场地整体情况。
(3)实现同步现场沟通:传统作业中塔吊、汽车吊、履带吊操作员习惯运用手势与地勤人员交流,但部分标志可能会被忽视或误解,导致双方信息不对称。应用塔吊系统后操作员可以直接在操控室了解到周围塔吊和吊车情况,结合传统的防碰撞物联网传感器,这种协同和信息共享可以减少沟通误解和协调问题,从而提高施工安全性。
(4)有效辅助管理人员科学决策:系统通过统计塔吊运行时间、预警次数、预警类型、吊装次数等数据,可得出塔吊整体运行情况综合评价分析,为塔吊运维工作和操作员监管工作提供数据支撑,有效辅助管理人员在作业排班、统计绩效和设备维护进行科学决策。
尽管基于CIM的塔吊碰撞预警系统取得了不错的应用成效,但是依然存在较多难以避免的问题。例如传感器和摄像头等元器件的使用寿命问题、物联传感器传输速率问题、移动式吊车转台水平角度传感器适配与对接问题、偏远地区4/5G信号传输稳定性问题等,这些问题更多的是影响传感数据的精度与稳定性,从而对防碰撞预警、吊重预警等功能造成延时性与正确性影响。同时,在防碰撞预警算法判断方面,目前仅以塔吊构件包围盒的顶点与边线去识别碰撞距离风险,存在一定的优化空间。针对以上问题,需要从传感器硬件设备、信号传输设备、碰撞算法等方面不断进行优化,从而提升系统预警功能的精确性和稳定性。
[1]许镇,吴莹莹,郝新田等.CIM研究综述[C]//中国图学学会土木工程图学分会.第七届BIM技术国际交流会——智能建造与建筑工业化创新发展论文集.《土木建筑工程信息技术》编辑部(Journal of Information Technology in Civil Engineering and Architecture),2020:15-21.
[2]赵挺生,胡俊杰,师玉栋等.基于FRAM的塔吊作业系统安全管理分析[J].工程管理学报,2020,34(06):131-136.
[3]张潇,张伟.塔式起重机安全事故统计分析[J].工业安全与环保,2019,45(09):24-29.
[4]段锐,邓晖,邓逸川.ICT支持的塔吊安全管理框架——回顾与展望[J].图学学报,2022,43(01):11-20.
[5]王倩,田莉梅.基于BIM的工程项目塔吊事故安全管理系统研究[J].廊坊师范学院学报(自然科学版),2020,20(01):91-95.
[6]牛前进,李春光,赵鑫.人工智能在塔吊管理系统中的应用前景分析[J].居舍,2022(16):159-160+174.
